



















تفاوت بین حالت های تنظیم سرعت موتور براش و موتور براشلس چیست؟
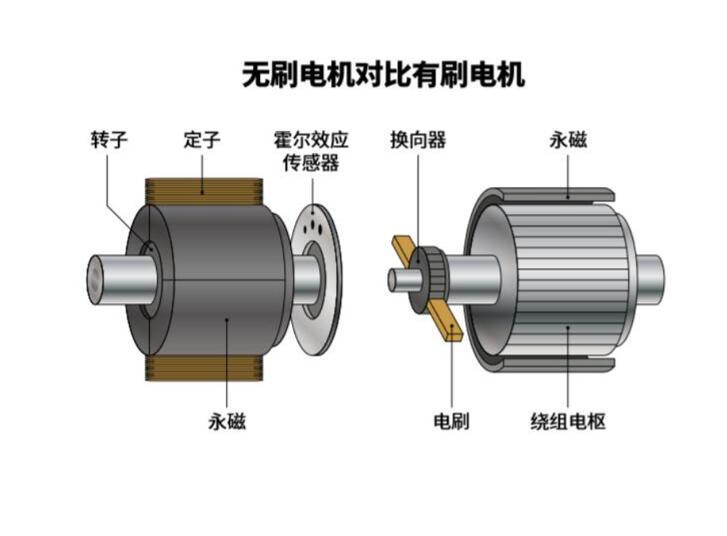
موتور براشلس کموتاسیون الکترونیکی را اتخاذ می کند، سیم پیچ حرکت نمی کند و قطب مغناطیسی می چرخد. موتور براشلس از مجموعه ای از تجهیزات الکترونیکی برای تشخیص موقعیت قطب مغناطیسی دائمی از طریق عنصر هال استفاده می کند. بر اساس این تصور، مدار الکترونیکی برای تغییر جهت جریان در سیم پیچ به موقع استفاده می شود تا اطمینان حاصل شود که نیروی مغناطیسی در جهت صحیح برای به حرکت درآوردن موتور، در نتیجه معایب موتور برس از بین می رود.
در واقع کنترل هر دو موتور تنظیم ولتاژ است. تنها زمانی که DC بدون جاروبک از کموتاسیون الکترونیکی استفاده می کند، می توان آن را با کنترل دیجیتال تحقق بخشید. DC بدون جاروبک را می توان با برس کربن جابجا کرد و می توان آن را با مدار آنالوگ سنتی (مانند یکسو کننده کنترل سیلیکونی) کنترل کرد که نسبتاً ساده است.
1. روند تنظیم سرعت موتور برس برای تنظیم ولتاژ منبع تغذیه موتور است. ولتاژ و جریان تنظیم شده از طریق کموتاتور و برس تبدیل می شود تا شدت میدان مغناطیسی تولید شده توسط الکترود را تغییر دهد و در نتیجه سرعت را تغییر دهد. این فرآیند تنظیم سرعت ولتاژ متغیر نامیده می شود.
2. فرآیند تنظیم سرعت موتور بدون جاروبک به این صورت است که ولتاژ منبع تغذیه موتور ثابت است، سیگنال کنترل تنظیم الکتریکی تغییر می کند و ریزپردازنده سرعت سوئیچینگ ترانزیستور MOS پرقدرت را برای دستیابی به تنظیم سرعت تغییر می دهد. این فرآیند تنظیم سرعت فرکانس متغیر نامیده می شود.
موتور براشلس یک محصول معمولی مکاترونیک است که از بدنه موتور و درایور تشکیل شده است. موتور براشلس در حالت کنترل اتوماتیک کار می کند. در شرایط تنظیم سرعت فرکانس متغیر، سیم پیچ راه اندازی دیگری به روتور موتور سنکرون که با بار زیاد راه اندازی می شود اضافه نمی شود و با تغییر ناگهانی بار، نوسان و تلفات وجود نخواهد داشت.

